-
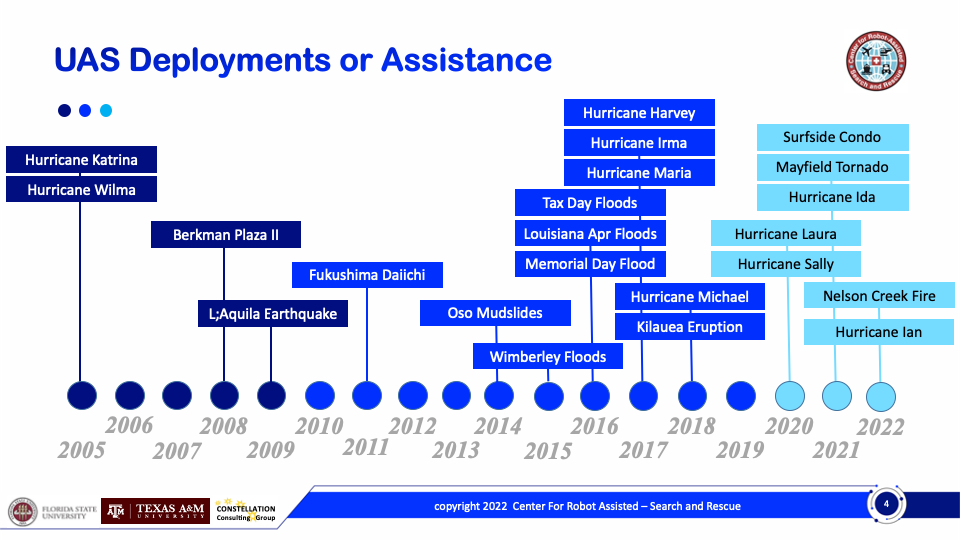
22 Drones Deployments or Assists Since 2005
Posted by Robin Murphy on Dec 06, 2022 at 6:14 am America/Chicago
Since 2005, when we had the first deployment of small...READ MORE
-

Flying Small UAS for Fooding in Rural and Mountainous Areas
Posted by Robin Murphy on Sep 18, 2018 at 12:34 pm America/Chicago
These are some of the lessons learned by the CRASAR...READ MORE
-
NBC Nightly News Feature on CRASAR “Robot rescue: Behind the technology deployed for disaster relief”
Posted by Robin Murphy on Aug 27, 2018 at 1:26 pm America/Chicago
NBC Nightly News on Aug. 28, 2018, featured CRASAR deployed...READ MORE
-
Six Lessons for Unmanned Systems at Wildfires
Posted by Robin Murphy on Aug 24, 2018 at 11:00 am America/Chicago
As the wildfire seasons burns on, here are 6 lessons...READ MORE
-
Two Notes About Flying Small UAS for Wildfires
Posted by Robin Murphy on Aug 06, 2018 at 5:14 pm America/Chicago
The California wildfires have generated significant interest in small UAS....READ MORE
-
Best Practices for Small Unmanned Aerial Systems for Floods Now Available!
Posted by Joan Quintana on Jun 21, 2018 at 8:10 am America/Chicago
With the extreme weather throughout the US, we’ve put together...READ MORE
Tags
- alpha geek
- asimov
- caterpillars
- collaboration
- cologne
- delft
- disaster reponse
- disaster response
- earthquake
- ethics
- firefighting
- ft hood
- Haiti Earthquake
- hawaii volcano
- Kobe Earthquake
- public safety
- rescue robots
- robocup
- robotics
- robotics rodeo
- snakes
- uav
- ugv
- UMV
- volcano eruption
- wired
- World Trade Center
Archives
- December 2022
- September 2018
- August 2018
- June 2018
- May 2018
- April 2018
- January 2018
- December 2017
- September 2017
- August 2017
- May 2017
- April 2017
- March 2017
- November 2016
- October 2016
- September 2016
- August 2016
- June 2016
- April 2016
- March 2016
- February 2016
- January 2016
- December 2015
- November 2015
- October 2015
- September 2015
- August 2015
- July 2015
- June 2015
- May 2015
- April 2015
- March 2015
- February 2015
- January 2015
- December 2014
- November 2014
- October 2014
- September 2014
- August 2014
- July 2014
- June 2014
- May 2014
- April 2014
- March 2014
- February 2014
- December 2013
- November 2013
- October 2013
- September 2013
- August 2013
- July 2013
- June 2013
- May 2013
- April 2013
- March 2013
- February 2013
- January 2013
- December 2012
- November 2012
- October 2012
- September 2012
- August 2012
- July 2012
- June 2012
- May 2012
- April 2012
- March 2012
- January 2012
- December 2011
- November 2011
- October 2011
- August 2011
- June 2011
- May 2011
- April 2011
- March 2011
- February 2011
- January 2011
- December 2010
- November 2010
- October 2010
- September 2010
- July 2010
- May 2010
- April 2010
- February 2010
- January 2010
- September 2009
- August 2009
- July 2009
- June 2009
- April 2009
- March 2009
Our Sponsors
