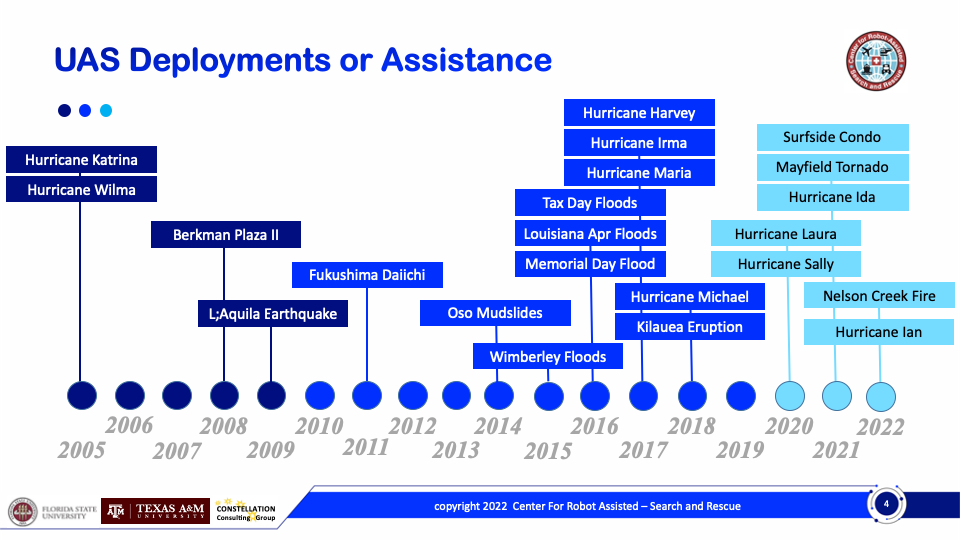
Since 2005, when we had the first deployment of small UAS for a disaster (Hurricane Katrina), we have had 22 drone deployments or assists in the US, Italy, and Japan to federally declared disasters or there equivalent. These are 10 hurricanes, 4 floods, 2 building collapses, 1 nuclear accident, 1 landslide, 1 tornado, 1 wildland fire, 1 earthquake, 1 volcanic eruption. The 22 doesn’t count numerous times we’ve worked with Fort Bend County OEM on pre-disaster mitigation of flooding.
Category: Rescue Robots
Flying Small UAS for Fooding in Rural and Mountainous Areas

These are some of the lessons learned by the CRASAR deployments to to Hurricane Maria (J. Adams, lead) and Oso Mudslides (R. Murphy, lead), and from outbriefs of the 2018 Northern Kyushu Heavy Rain Flood in Japan. It is a special case of the just-in-time best practice guides for flooding at https://www.crasar.org/wp-content/uploads/2018/06/best-practices-SUAS-Floods-2018.pdf
In rural and mountainous areas, UAS are typically used for reconnaissance of areas that can’t be reached by road (or road is blocked) or rural areas where manned assets are not in use, assessment of where the water is and how fast it is flowing, determining transportation routes, and overwatch of swift water rescue, What makes rural and mountainous areas different is the lack of access (less roads, open spots), trees, and the difficult terrain.
Here are some notes about flying:
- UAS can’t fly in heavy rain and fog, sometimes you just have to wait
- UAS can fly directly to houses or villages on mountains or in valleys, providing rapid access
- A strategy is to fly UAS along the centerline of the roads. The UAS can get a quick assessment as houses, shops, buildings tend to be near roads. Unlike just driving by in a ground vehicle (which be useful, see the GroundVu system), it can be very useful to be able to see behind the houses, where there could be damage or signs that people were still there. Along the way, the UAS can check the state of roads to remote areas, like has it washed away. Plus flying the centerline avoids unexpected tall trees and power lines which seem to come out of nowhere!
Be aware that:
- BVLOS flying can be challenging as maps don’t always show power lines, really tall trees, or other structures especially in undulating terrain; a topological elevation map isn’t sufficient
- While manned aviation in rural and remote areas is likely to be less dense than near metropolitan areas, it may still be present so aerial safety is important
- Mapping will generate massive amounts of data that have to be managed and post-processed; it is useful to create a picture of kilometers of road but worthless if there is not bandwidth or software on a computer that can rapidly process the data
- Fixed wings typically present problems for staying at the AGL maximum in mountainous terrain, though new terrain sensitive planners are becoming available
NBC Nightly News Feature on CRASAR “Robot rescue: Behind the technology deployed for disaster relief”
NBC Nightly News on Aug. 28, 2018, featured CRASAR deployed ground robots from the 9/11 World Trade Center, as well as marine vehicles used at the Japanese Tsunami and the Syrian Boat Refugee Crisis, plus UAVs at Harvey. The coverage is unusual that the producer deliberately wanted to focus on ground and marine robots, which is great because emergency professionals often forget about the value of these assets. But UAVs made it in there and many thanks to Fort Bend County Judge Hebert for his comments. The piece was expected to be longer but a whole lot of “hard news” has been happening. Robin Murphy represented CRASAR plus her work at Texas A&M, but the real stars are the members of CRASAR and Roboticists Without Borders and our agency partners!
Six Lessons for Unmanned Systems at Wildfires
As the wildfire seasons burns on, here are 6 lessons learned for small unmanned aerial systems and even unmanned ground vehicles. These are based on CRASAR member collective experiences, such as the recent deployment to the California wildfires and the Kilauea volcanic eruption as well as numerous tabletop exercises and focus groups that we have hosted or participated in. These include agencies such as CAL FIRE and the Department of the Interior as well as private landowners, smokejumpers.
- If you have a small UAS, don’t fly it unless you are really, truly authorized to fly. Large wildland fires almost always have a TFR (temporary flight restriction) on all manned and unmanned aircraft- the equivalent of police yellow Do Not Enter tape. The TFR makes it safer for the manned aviation which is flying at low altitudes to evacuate people, drop fire suppressants, and monitor the fire. No small unmanned aerial system can fly, even under hobbyists rules, without a) explicit permission from the agency managing the TFR and b) approval by the FAA. While a small UAS may not physically destroy a helicopter, a collision or a sudden swerve can lead to an accident, so flying an unauthorized small UAS during an event is a lot like dropping small rocks from an overpass onto the interstate— you probably won’t damage the car engine but it still might lead to a wreck.
- Flying in a TFR zone is feasible. As our experiences at Hurricane Harvey show, it is actually easier to coordinate flying in a hurricane with a TFR. As long as you have an Air Boss, that is the director of Air Operations- it is an official role in the incident command hierarchy, who is knowledgable about both manned and unmanned aircraft, then it is fairly simple to partition by mission, altitude, area, and contingencies. A TFR helps thin out the non-essential drones, though a few people will still continue to fly theirs illegally. A TRF can allow sUAS to fly above the 400 ceiling.
-
Night flying is a big win for authorized small UAS. Recent events as well as numerous tabletop exercises sponsored by AUVSI and CRASAR with CAL FIRE, Department of the Interior, and other agencies including those that supply smokejumpers, continue to highlight that drones are particularly useful at night when the fire crews are down and manned aviation does not fly. As seen in our deployment to Hawaii, getting permission to fly at 1,000 ft AGL gives much more coverage than 400 ft and there is less wireless dropout.
- Mapping is useful but the key isn’t flying, it is determining what kind of mapping is needed and how the data will be processed (and by whom)? This merits talking about in depth.
- What type of mapping is needed? There is quite a bit of difference in flying, processing, and comprehension.
- Do many decision makers need to easily comprehend the situation? Then perhaps Hangar 360 which gives a 360 panorama that is easy to understand (versus a birds eye nadir view) and move around over a website and only requires sending URL is the way to go. Do the GIS people need updated maps for analytics? Then photogrammetric processing of orthomosaics or digital elevation maps may be in order .
- What is the area to be mapped- 10 acres? 100? or 10,000? Large areas mean higher altitude, longer range assets. An Institu ScanEagle or a manned aircraft can cover more and more effectively that trying to piece together a quilt of areas flown by a Mavic- and that assumes that the Mavic team could reach the locations needed to map those quilt pieces. Small UAS flying at low altitudes are great for mapping small areas of interest or hot spots but not good for larger areas.
- Don’t just fly missions, think through the mapping process- don’t just fly and then drop off an unsorted SD card (yes that happened). Put each mission on a separate folder or better yet separate SD cards! Don’t mix mapping and recon— devote a flight to recon with imagery and video, then fly a separate flight for mapping What post-processing will be used? Datamapper? Pix4D? Agisoft? Does the agency have that license or a way to pay for it?
- SUAS may provide better image quality for local areas or help with small fires, but remember that large fires are supported by manned aircraft, higher altitude UAS, and satellite imagery. sUAS may be able to fly under the smoke plumes that interfere with imagery from high altitude assets. Infrared for large wildfires is already provide by manned aircraft, higher altitude UAS, and satellites. For example, agencies have been using thermal systems that orbit an area and determine the boundary of the fire for several years. And again, sUAS may be valuable for hot spots and small fires.
- Don’t forget about ground vehicles and the types of imagery they can produce. An autonomous ground vehicle with a ground-based system such as GroundVu that captures 3D imagery can provide rapid damage assessment (think of it as disaster StreetView). Justin Adams, our president, and GroundVu CEO Myles Sutherland just returned from assisting with the Shasta and Redding fires. They collected over 100 miles of 360 degree imagery that embeds in ESRI products in just a few days. The citizens of Fort Bend County loved GroundVu- they could click on the path down their street and see the state of their house.
Please subscribe to our YouTube Channel and check out our website at crasar.org for tips and strategies for safely and rationally incorporating unmanned systems into disasters.
Lessons Learned: Deploying UAVs for Volcano Eruption Response
Having recently supported the response to Hawaii volcano eruption at Kilauea Volcano Lower East Rift Zone, we offer the following insights and lessons learned regarding use of UAVs for volcano eruption response.
Night flights of UAVs are very effective.
Manned aviation generally cannot fly at night, meaning responders are essentially blind for 8-12 hours. But UAVs can fly at night. There are no challenges coordinating with manned aircraft since they are not flying, and it is easier to keep the UAV in visible line of sight.
Rotorcraft UAVs can effectively sample gas.
We used the Flymotion stinger attachment to carry a four-gas meter and map the Kilauea plume. Caution: If your UAV isn’t designed for attaching payloads, it may be unstable and crash.
Rotorcraft UAVs with thermal sensors are very effective.
Rotorcraft UAVs with thermal sensors are particularly effectivefor determining new lava flows from old flows and for seeing at night. We found the DJI Zenmuse XT2 to be particularly useful. It produces radiometric jpgs where the pixel value is the temperature.
Rotorcraft UAVs provide a quick look at lava flow rates.
Rotorcraft UAVs provide a quick means of determining how fast lava is moving. Fly the UAV with a nadir view to the edge of the lava, get the GPS coordinate, repeat in a few minutes, do the math.
Plumes will interfere with photogrammetric mapping.
Plumes will interfere with photogrammetric mapping. Expect errors, lower visibility, and failed stitches.
Hanger 360 rapidly produced panoramas.
Hanger 360 rapidly produced panoramas without flying over property or people. Even better, the panorama resides in the web so responders don’t have to have download apps or have a special mouse to move through the image. And, they can easily email or text url to others.
Back from Leilani volcanic eruption…
A five person volunteer team from the Center for Robot-Assisted Search and Rescue deployed to the Leilani Estates Eruption event (Hawaii) from May 14-19, 2018 with a cache of small unmanned aerial systems rotorcraft and sensors. CRASAR supplemented existing sUAS capabilities from the University of Hawaii Hilo, allowing them to focus on geographical and volcanology aspects, while providing expertise in tactical operations. During the 16 night flights when manned aviation was prohibited, the CRASAR team identified a new fissure and provided the data used by the USGS to determine the rapid acceleration of the lava flow. Other day missions charted SO2 emissions, mapped fissures, assisted with a live save, supplied tactical situation awareness, and reduced the risks and costs of manned helicopter flights. The sUAS flights were notable for the extent of night flying, flight operations in unfavorable rain and wind conditions, the use of the new X5S thermal sensor, air sampling with rotorcraft, the use of Hangar Enterprise Platform for rapid reconnaissance, flying at 1,000 ft AGL, and live streaming over FirstNet. The CRASAR pilots were Justin Adams (Constellation Consulting Group), David Merrick and Laura Hart (Florida State University Center for Disaster Risk Policy), Jon McBride (Rocky Mountain Unmanned Systems), and Robin Murphy (Texas A&M University). Funding was provided in part through research grants from an insurance partner and the National Science Foundation. At this time, the imagery and video collected at the event has not been released to the public by the Hawaii Civil Defense, and thus we cannot share it.

6 Ways volcanoes are different for flying small UAS
We’ve been watching the Hawaii volcano with interest- it is a first of its kind event for small UAS. Check out the short podcast. And hope the volcano doesn’t blow… best wishes to the responders and the people impacted.
Ground, Aerial, and Marine Rescue Robots of the Year Announced at National Robotics Week
With the 2018 hurricane season just weeks away, the independent not-for-profit Center for Robot-Assisted Search and Rescue (CRASAR) announced the first ever Disaster Robotics Awards. Awards were announced for the 2018 Ground, Aerial, and Marine Rescue Robots of the Year on April 14, 2018 during a National Robotics Week ceremony at SEAD Gallery in Bryan, TX.
CRASAR’s 2018 Aerial Rescue Robot of the Year is the DJI Mavic Pro. With a price tag of $1,000, experts found this drone was able to do everything they needed. Because batteries are expensive, the low price and the ability to recharge using a car charger are particularly important, as is the stabilizing camera with pan and tilt. The review team also noted DJI Mavic Pro’s first-person view, as well as programmed views provide the option of broad, NASA-style tiled mapping if needed. Most importantly, DJI Mavic proved itself a workhorse among responders and quickly became the tool of choice, flying 78 of the 112 flights during CRASAR’s Hurricane Harvey response and just weeks later, 247 of 247 flights when they responded to Hurricane Irma.
Another workhorse among the 2018 honorees is the 2018 Marine Rescue Robot of the Year, Hydronalix EMILY. Among the most used by lifeguards worldwide, this water-based robot boat has the ability to run rescue lines to people in distress and the capacity for five to eight people to hang on while being towed to safety. These features have made surfboard-sized EMILY a favorite among lifeguards in both routine and large-scale water rescues, including refugee rescues along the migrant route in the Aegean Sea.
A lesser known but very promising terrestrial robot captured the win as the 2018 Ground Rescue Robot of the Year. Carnegie Melon University’s aptly named Snakebot can propel itself into the smallest of spaces, allowing rescuers to search for signs of life where dogs and people cannot reach. The 2017 Mexico City earthquake marked the first use of Snakebot in the response phase of a disaster operation.
“These robots enable life-saving decision making for responders and emergency managers,” Murphy says. “Rescue decisions and critical infrastructure decisions during that response phase are made very rapidly based on the best available information at the time and these robots, well-deployed with the right teams of operators and experts, are getting key information to decision makers so they can save lives and efficiently manage risk.”
Spearheaded by internationally renowned Disaster Roboticist Dr. Robin Murphy, the Disaster Robotics Awards were created to raise awareness of the role and value of robots for disaster response and help prepare responders to put these resources to work in both routine response and disasters.
“The goal of the Disaster Robotics Awards is twofold,” Murphy explains. “One, we are letting people know what’s working and why. Two, we want to get people thinking about the next disaster.”
The ceremony also included awards and acknowledgements. Educator of the Year went to David Merrick at the FSU Center for Disaster Risk Policy, for his work in developing and offering classes in small UAS aimed specifically for the needs of emergency professionals. One of the courses Is now available online at https://tinyurl.com/suas-course. Agency Partner of the Year went to Fort Bend County Office of Emergency Management for partnership on the Hurricane Harvey preparations, response, and recovery activities. The Service Award was awarded to Justin Adams who coordinated CRASAR operations as well as served as the Air Operations Chief for manned and unmanned operations for Fort Bend County during Harvey, then was CRASAR operations for Hurricane Irma, and deployed a third time to Hurricane Maria for three weeks.
Hurricane season begins June 1 and experts are anticipating a strong season of storms again in 2018. Murphy and her colleagues based the 2018 Disaster Robotics Awards on what robots worked well for responders over the last year. The CRASAR team documented robot use in response to hurricanes Harvey, Irma, and Maria, the Mexico City earthquake, and water rescues of Syrian boat refugees and elsewhere, gathering data regarding number, duration and nature of deployment. With these insights into what robots work best for responder, the 2018 honorees were selected.
While the awards recognize the contribution of robots in disaster response over the last year, CRASAR’s insights into the value of and best practices for robots in disaster response date back to the first use of robots in disaster response at the World Trade Center in the aftermath of the September 11th attacks. Murphy was on hand in New York and has been deploying robots in disaster response globally ever since. Through her work with both CRASAR and the Humanitarian Robotics and AI Laboratory in Texas A&M University’s Computer Science and Engineering Department, Murphy and colleagues continue to promote best practices and offer support to responders seeking the benefits of disaster robots.
Top 5 Surprises in Unmanned Systems for Mudslides

I’ve been getting questions about the use of unmanned systems for the recent horrific Montecito mudslides, so let me extend my earlier tweet, both in terms of thoughts and prayers to the victims and also the technical details. It does not appear that small UAS are being used by the formal responders for Montecito.
- Unmanned systems- ground and aerial- have been used since 2005 and there are opportunities for marine systems as well. Unmanned systems have been used at least three times in the United States for landslides, two by CRASAR teams. UGVs were used for the 2005 La Conchita, California mudslide (which was the first ever use of an unmanned system for a mudslide), while UAS were used for the 2014 Oso, Washington, and Collbran, Colorado, mudslides. Both fixed and rotorcraft UAS were used at Oso and Collbran.At Oso, it would have nice to have had an autonomous marine vehicle with sonar to map the underwater portions. See this paper on the 2005 La Conchita and blog mudslide and 2014 Oso mudslide plus more lessons learned are in Disaster Robotics and in our older blogs. Plus see video Oso composite of small UAS flights
- The primary use for UAS has been for reconnaissance and mapping, not life safety. In the La Conceit mudslide, CRASAR worked with Ventura County, Los Angeles County, and Los Angeles City fire departments using shoe-boxed sized ground robots to try to get through basement voids and narrow windows in order to search collaterally damaged buildings for a missing family. Search dogs had given ambiguous indications but it was too dangerous to send in a human responder and the dogs couldn’t squeeze in. The robots weren’t used in the primary mudslide area because this type of mud had penetrated every house in its path leaving no pockets and would require a burrowing robot such as the sand lizard styles being researched by Dan Goldman and Howie Choset. In the Collbran (Deputy Sheriff Ben Miller at Mesa County used their systems) and Oso mudslides (The Field Innovation Team/CRASAR team worked under the direction of Snohomish County), the UAS were used for gathering essential elements of information about the disaster area and assessing the situation. This includes determining the boundaries of the disaster area; access points to the disaster area; social, economic and political impacts (e.g., at Oso there were concerns about additional property damage and impacts on salmon); geophysical information (e.g., topology and volume of debris); projecting impacts; and initial needs and damage assessment. The Montecito mudslides illustrate that another EEI, assessing the status of transportation systems— what roads and trails were still open to get responders in and civilians evacuated, is also important. The UAS at Oso and Collbran also allowed the incident commander to see where teams actually were and also ensure that unauthorized personnel weren’t entering the cordoned off area.
- A UAS platform that can perform only autonomous mapping is highly limited for the immediate response. Both Oso and Collbran had missions that required first person view/manual flight where experts could direct the UAS in real-time in order to better assess the situation. At Oso, the PrecisionHawk Lancaster was extremely valuable in rapidly mapping the disaster, but the responders also used the AR100B quadcopter to hover and stare over the water to estimate flow rate, locate personnel, determine progress on mitigation efforts, and generally get closer looks at objects and activities that they didn’t know that needed to look at until they saw it from the air.
- The biggest unanticipated UAS challenge has been flying mapping missions in complex terrain, not endurance or distance. While having a UAS with the endurance and capability to cover an entire mountain from a single launch point is important, the limitations (and LOS regulations) are well-understood by the UAS operators. The unexpected problem was the complexity of the terrain. The autonomous mapping software programs assumed a flat earth, suitable for agricultural mapping but the areas of interest were in the “toe” of a mountain and a plain. The elevation of the landscape varied. In addition, the landscape had forests with some trees higher than others. This presented challenges for autonomous mapping, especially as it was desired to fly the UAS as low as practical in order to get the high resolution imagery. The operators had to create “stair steps” missions for fixed-wings and vertical slices for quadcopters. In Oso, the CRASAR team used a quadcopter to fly to the tallest tree in a “patch” and get the actual height so that the fixed-wing could be programmed to stay well above that height. The advances in obstacle avoidance by DJI would have been very helpful.
- Protecting personal identifying information (PII) and privacy has been the biggest barrier in deployment. Data management and chain of custody has long been a requirement of unmanned systems use by formal response agencies. The Oso mudslides illustrated how touchy PII and privacy can be. At the Oso Mudslides, UAS operations were suddenly cancelled due to concerns over victim privacy; this was later resolved when the incident command staff was able to clarify that the UAS would be flying over the “toe” of the mudslide and river and not where victims were being recovered. Ironically, the FIT/CRASAR team had talked to all the local property owners to assure them that the UAVs would not be flying over their land and any recorded imagery would belong to the county and released only with their permission.
If you have documentation on other deployments of unmanned systems to landslides, please send me the info and I’ll send you a CRASAR patch!
CAUSE V: Testing Telecommunications Coverage and Bandwidth for small UAS
In November, members of the Roboticists Without Borders small UAS and UMV teams participated in CAUSE V, a joint US-Canada DHS exercise focusing on wireless communications during a disaster. Check out the fantastic article by Jim Moore, one of our newest RWB members, at: https://www.aopa.org/news-and-media/all-news/2017/december/11/the-art-of-disaster-response-by-drone
CAUSE V is a good example of the telecommunications challenges in exploiting unmanned systems during emergencies. CRASAR has been working with Dr. Walt Magnussen and the Internet2 Technology Evaluation Center through the Winter Institute series and I’ve presented to the President’s National Security Telecommunications Advisory Committee in 2016. At CAUSE V, we encountered that same telecommunications problems that I’ve seen since the early 2000’s (and continue to present on). Two challenges- that network coverage doesn’t match the area of operations and there is insufficient bandwidth— are detailed below in the hopes of providing more clarity.
One, Coverage of the emergency wireless networks did not match the actual area of small UAS operations and would not have covered the areas of operations seen in our previous disasters.
There seems to be an assumption that each UAS team will drive around in a command vehicle and operate from a fixed location. In reality, a group such as ours may have a command vehicle that would serve as forward operating base but individual teams might be embedded with an agency and their vehicles or drive SUVs. The CAUSE V team installed a connection to the emergency network in our mobile lab and provided us with a wireless “bubble” around our mobile lab of about 500 feet.
A UAS team ranges far from the forward operating base and is constantly on the move (and ideally there are many teams). At the CAUSE V exercise, we had 3 teams in the field at any given time and they were between 29-40 miles away from the mobile lab. At Hurricane Harvey, CRASAR had between 2 and 6 teams in the field at any given time and they were operating between 2 and 45 miles from the nearest base of operations. The time at a location for the the CAUSE V missions and most missions at Harvey was on the order of 16 minutes or less- reinforcing that the teams are highly mobile.
Two, Bandwidth was not sufficient for real-time streaming from one or more UAS, sharing high resolution imagery and video, or uploading imagery for post-processing in the cloud.
Every disaster is different but in general I witness that the immediate response phase of disaster (usually the first 24-48 hours) is characterized by responders and emergency managers seeking immediate situation awareness. The longer they have to defer decisions about life-saving and about what resources to call in, the slower the response and the more shortages in food, water, power, etc. for the citizens because of latency in ordering.
During the immediate response phase, the small UAS provide bursts of:
- low resolution streaming video. Responders need to see (and direct) what the UAS is seeing in real-time. Since every disaster is different, what they need to see isn’t predictable, so if the UAS team flies but doesn’t capture all the data or from the wrong angle- the team will have to return to re-fly because they will have been done in 20 minutes and moved to the next site which might be 20 miles away. Even a 15 minute latency in streaming can result in hours and hours of delays in re-flying and ultimate decision making. And add months to recovery (if you believe in the Haas, Kates, and Bowden model).
- high resolution imagery and video. Low resolution is low resolution, you can’t see everything that’s there. As a result, responders such as structural experts will want to go over the individual high rez images and video that are stored on SD cards. But that imagery needs to get to them fast enough from them analyze it and make decisions or recommendations for the next operational period which is roughly every 12 hours. Without higher bandwidth, the current options are for each team to travel back to the forward operating base (which may be 20 miles away but make take 3 hours to drive due to road closures, detours, etc.) or to have a courier adding more manpower. At Texas A&M, we are working on software to snippet and prioritize data to be transmitted but all of work domain analyses suggest that there will still be A LOT of data to transmit. ASAP. Not tomorrow or 3 days from now, which one telecoms person suggested saying that 3 days to get that high res data would be ok, right? No, it’s not OK.
Note that mapping and photogrammetric post-processing may not be involved in the immediate response phase for all types of disasters- and looking over our deployments as well as those of other agencies, we are seeing that it rarely is requested or is of value in the immediate response phase. At Harvey, the emergency management agencies wanted solely FPV for the first few days and then shifted to mapping as operations on 9/2/2107 shifted to mitigation and restoration of services (which generally starts about 48-72 days after the event, which may be where the “they don’t need the higher resolution data for 3 days” came from).
But in CAUSE V, a volcanic explosion with a lahar flowing down the mountain, volumetric data from imagery would be extremely important to have as fast as possible and ideally calculated within at least one 12 hour planning cycle. This means driving to the site, flying, driving back, uploading 200-800 high resolution images (from a SINGLE flight) to the cloud, and then downloading the final product- a file somewhere between 0.5 and 3 GB (not the most convenient size to email or share)- in less than 12 hours. One of our mapping flights from Harvey took 17 hours to upload- and we were in the metro-Houston area that hadn’t lost cellular infrastructure!
One solution is for the UAS team is edge computing– to process this in the field or at the forward operating base- assuming that they can afford the software license and the high end computer. We believe that less emphasis should be on the Cloud and more work needs to be into edge computing, where more computation is done onboard the UAS or controller and is done more “invisibly” to the UAS team who don’t have time and cognitive resources to expend.
Regardless, telecommunications continues to be an important key in effective unmanned aerial SYSTEMS. And many thanks to the organizers who are pro-actively trying to learn how to make telecommunications and FirstNet work for the good of us all!
